Ученые предложили робота для исследования пещер Марса
На планетах Солнечной системы есть большое количество мест, представляющих особый интерес для ученых, но являющихся труднодоступными для стандартных планетоходов. Одной из таких областей выступают марсианские пещеры, которые могут приоткрыть завесу того, существовала ли когда-то жизнь на Красной планете. Ученые из Стэнфорда надеются заполнить этот пробел в знаниях о Красной планете с помощью робота ReachBot.
Впервые концепция робота ReachBot, созданного инженерами Стэнфордского университета (США) для изучения марсианских пещер, была представлена на суд общественности в 2021 году. Тогда группе ученых удалось выиграть грант от Института передовых концепций NASA на реализацию первой фазы.
Авторы проекта хотели соединить две технологии: мобильных роботов-манипуляторов наподобие Robonaut и LEMUR и развертываемых космических структур. Первые уже широко используются в освоении космоса: их применяют для обслуживания МКС, однако их мобильность остается ограниченной.
Развертываемые же конструкции чаще используются в спутниках. Они позволяют уменьшать пространство, необходимое для размещения солнечных панелей и антенн в обтекателе ракеты, и делают это путем развертывания только после выхода в открытый космос.
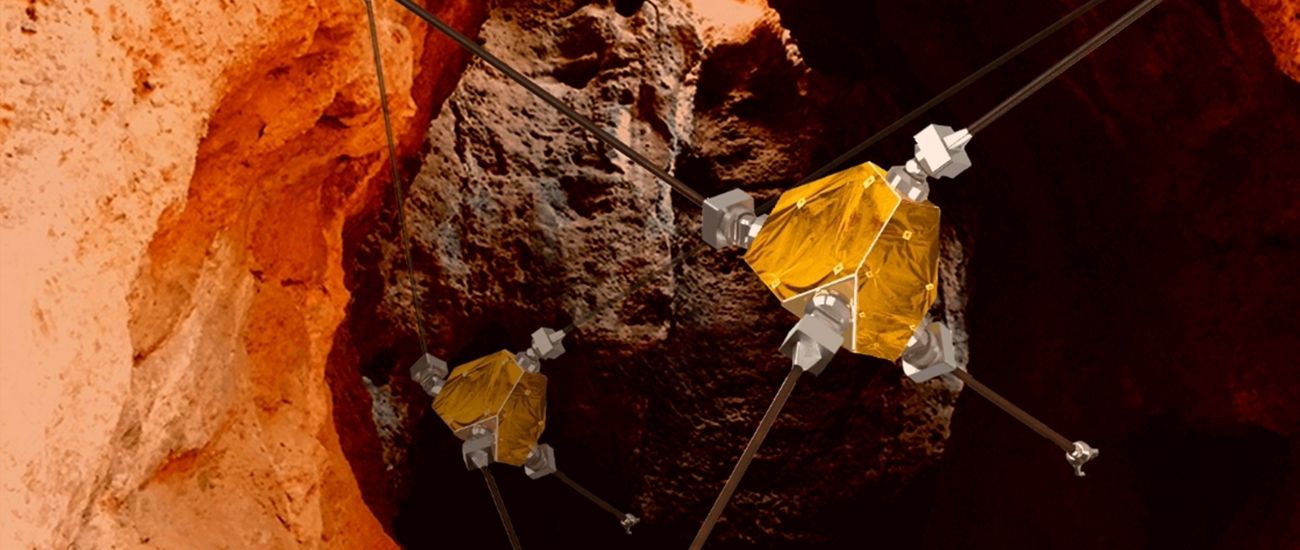
ReachBot взял лучшее из обоих миров. Легкий и компактный робот оснащен четырьмя выдвижными «руками» с захватами на концах. С их помощью робот перемещается. Вращающиеся «суставы» расположены на равном расстоянии друг от друга, что в совокупности напоминает форму тетраэдра.
Помимо того, что ReachBot способен передвигаться по сложному рельефу местности, он также сможет — пока, впрочем, теоретически — взбираться по отвесным скалам. Ведь он сконструирован таким образом, что одна из его свободных «рук» может захватывать следующую точку для перемещения: такая техника передвижения чем-то напоминает скалолазание.
Кроме того, инженеры адаптировали конструкцию робота к низкой гравитации Марса. В планах у группы ученых было протестировать прототип ReachBot в реальных условиях, подобных тем, с которыми робот мог бы столкнуться на Марсе. Однако на данный момент они все еще продолжают разработку устройства после завершения первой фазы проекта.
Самое популярное



